

Basler Stereo Camera
Basler Stereo Camera consente ai robot di percepire l’ambiente circostante in tempo reale. Tutte le telecamere sono dotate di un pacchetto software completo preinstallato, adatto alle tipiche applicazioni di robotica.
La telecamera stereo Basler offre in un solo sistema qualità a livello industriale per applicazioni di robotica a guida visiva in settori quali l’automazione di fabbrica e la logistica.
Queste telecamere 3D possono essere integrate direttamente, senza computer esterni.
Caratteristiche
Plug and Play
Non è necessaria alcuna esperienza o competenza precedente in materia di visione industriale.
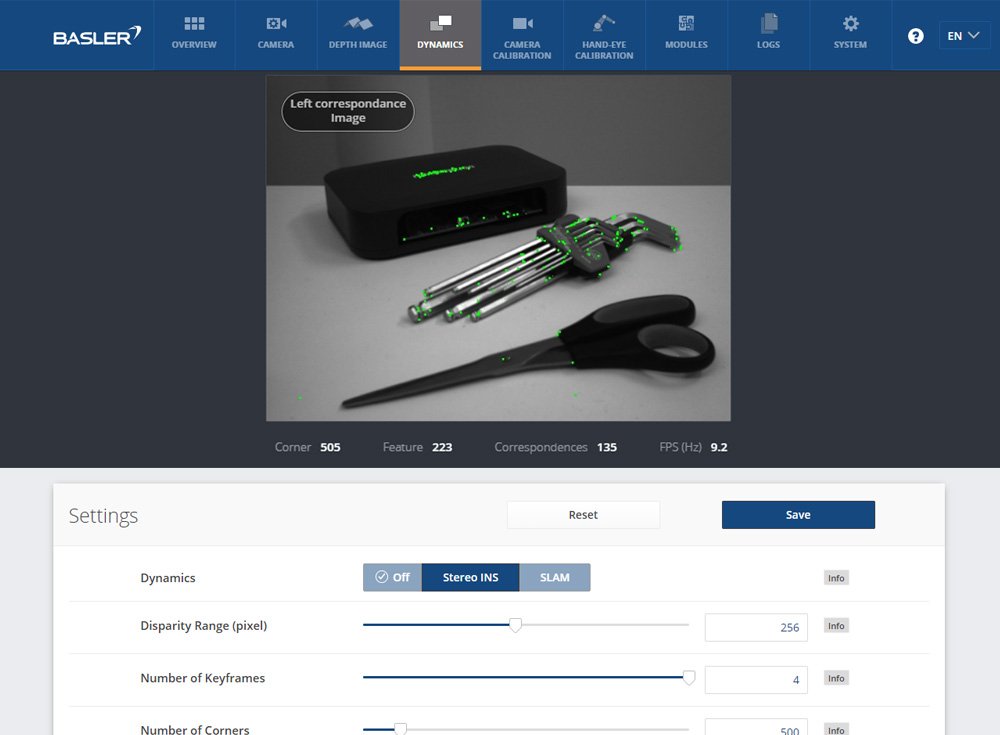
L’interfaccia web di facile utilizzo della Stereo Camera Basler consente un’installazione semplice e un utilizzo intuitivo. La Stereo Camera può essere collegata e configurata anche tramite Rest-API, ROS e GenICam.
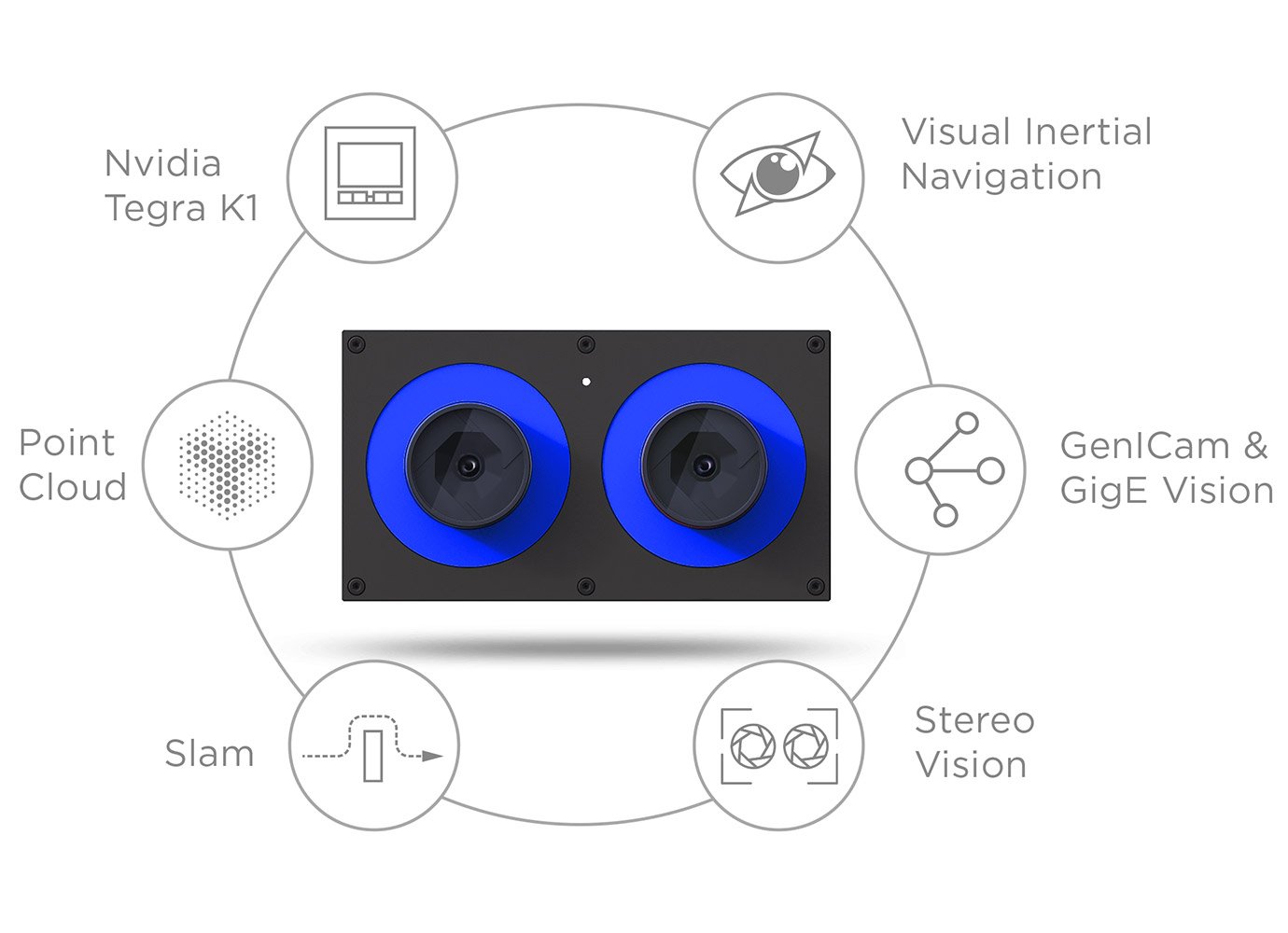
Onboard processing
Grazie a una scheda grafica integrata, le immagini di profondità sono generate direttamente dalla telecamera e non richiedono potenza di calcolo esterna. Si tratta di un requisito ideale per i sistemi mobili. Le nuvole di punti possono essere facilmente generate dall’immagine di profondità.
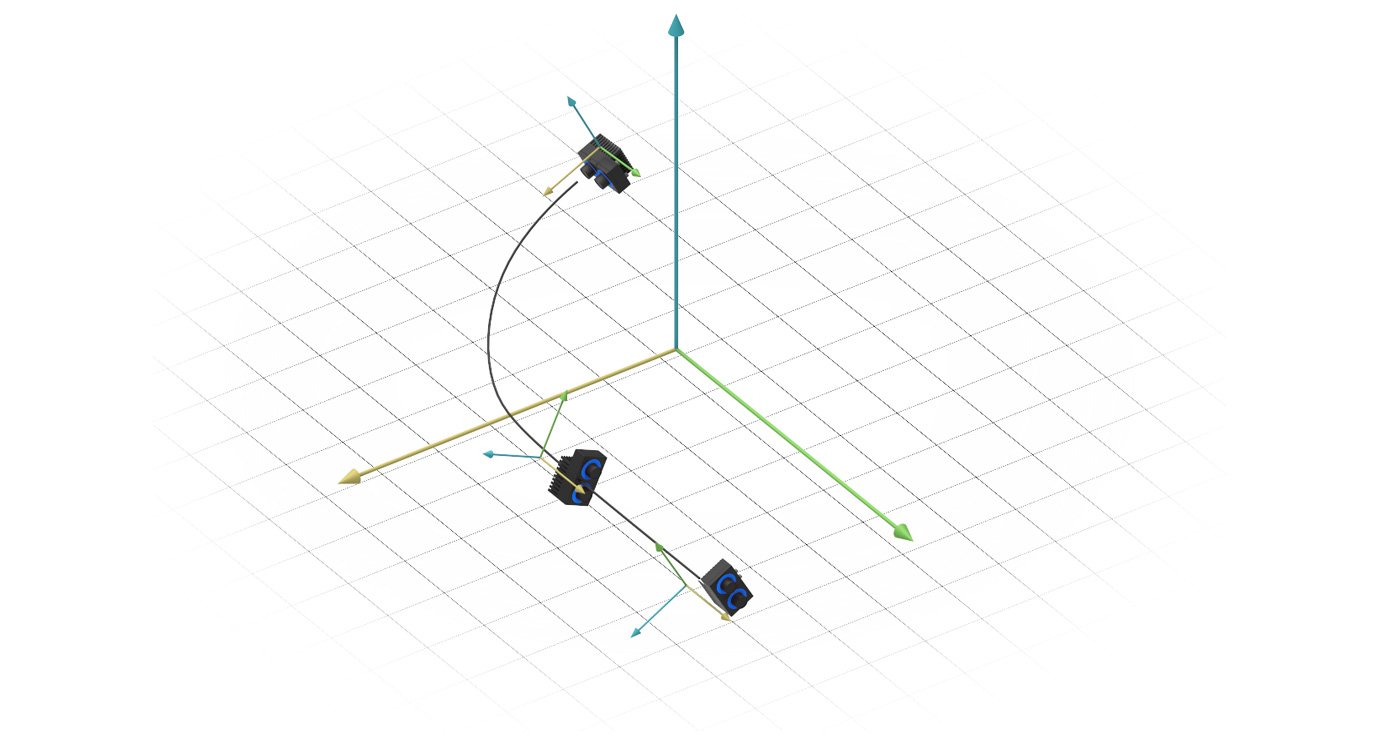
Visual odometry
Utilizzando i più avanzati algoritmi di odometria inerziale visiva, la Basler Stereo Camera registra la sua posizione corrente e il suo allineamento con la massima precisione. La bassa latenza consente l’integrazione diretta nel ciclo di controllo quando la telecamera è montata su un robot.
Scenari applicativi

Logistica
- Navigazione interna di veicoli
- Carico e scarico di macchine
- Depalettizzazione e pallettizzazione

Automazione industriale
- Manipolazione
- Montaggio
- Conteggio dell’inventario

Agricoltura
- Conteggio/previsione del raccolto
- Analisi dello stato di salute delle piante
- Identificazione e rimozione precisa delle erbe infestanti

Robotica
- Servizi di ritiro e consegna
- Supporto nella vita quotidiana
- Assistenza nella preparazione dei cibi
| Camera model | Stereo camera 65 mono / color | Stereo Camera 160 mono / color |
|---|---|---|
| Baseline | 65 mm | 160 mm |
| Focal length (lenses) | 4 mm | 4 mm (standard), 6 mm (option for mono) |
| Shutter | Global | Global |
| Image resolution | 1280 x 960 Pixel (1.2 MPixel) @ 25 Hz | 1280 x 960 Pixel (1.2 MPixel) @ 25 Hz |
| Field of view | Horizontal: 61° Vertikal: 48° |
Horizontal: 61° (4 mm lens), 43° (6 mm lens) Vertical: 48° (4 mm lens), 33° (6 mm lens) |
| Depth range (recommended) | 0.2 m – 1.0 m | 0.5 m – 3.0 m |
| Workspace | 0.2 m distance: 0.17 m x 0.18 m 0.5 m distance: 0.54 m x 0.45 m 1.0 m distance: 1.14 m x 0.90 m |
4 mm lens: 0.5 m distance: 0.44 m x 0.45 m 1.0 m distance: 1.04 m x 0.90 m 2.0 m distance: 2.24 m x 1.80 m 3.0 m distance: 3.44 m x 2.70 m 6 mm lens: |
| Depth resolution | 0.04 mm @ 0.2 m 0.9 mm @ 1.0 m |
4 mm lens: 0.1 mm @ 0.5 m 0.4 mm @ 1.0 m 1.5 mm @ 2.0 m 3.3 mm @ 3.0 m 6 mm lens: |
| Depth image resolution & FPS | 1280×960 Pixel @ 1 fps, with Cube @ 12.5 fps 640×480 Pixel @ 3 fps, with Cube @ 25 fps 320×240 Pixel @ 15 fps 214×160 Pixel @ 25 fps |
1280×960 Pixel @ 1 fps, with Cube @ 12.5 fps 640×480 Pixel @ 3 fps, with Cube @ 25 fps 320×240 Pixel @ 15 fps 214×160 Pixel @ 25 fps |
| Ego-motion (IMU) | 200 Hz. low latency | 200 Hz. low latency |
| GPU/CPU | Nvidia Tegra K1 | Nvidia Tegra K1 |
| Interfaces | Web GUI, Rest API, GenICam, GigEVision 2.0, UDP based ego-motion interface | Web GUI, Rest API, GenICam, GigEVision 2.0, UDP based ego-motion interface |
| Connectors | 8-pin A-coded M12 socket for GigE 8-pin A-coded M12 plug for GPIO and power |
8-pin A-coded M12 socket for GigE 8-pin A-coded M12 plug for GPIO and power |
| Power supply | 18-30 V | 18-30 V |
| Temperature range (Celsius) | 0°C-50°C (passive cooling) | 0°C-50°C (passive cooling) |
| Size (LxHxW in mm) | 135 x 75 x 96 mm | 230 x 75 x 84 mm |
| Weight | 680 g | 850 g |
| Protection class | IP54 | IP54 |





