localizzazione degli oggetti
applicazioni di bin picking
Photoneo
Bin Picking Studio 1.6.0
Photoneo bin picking and localization software
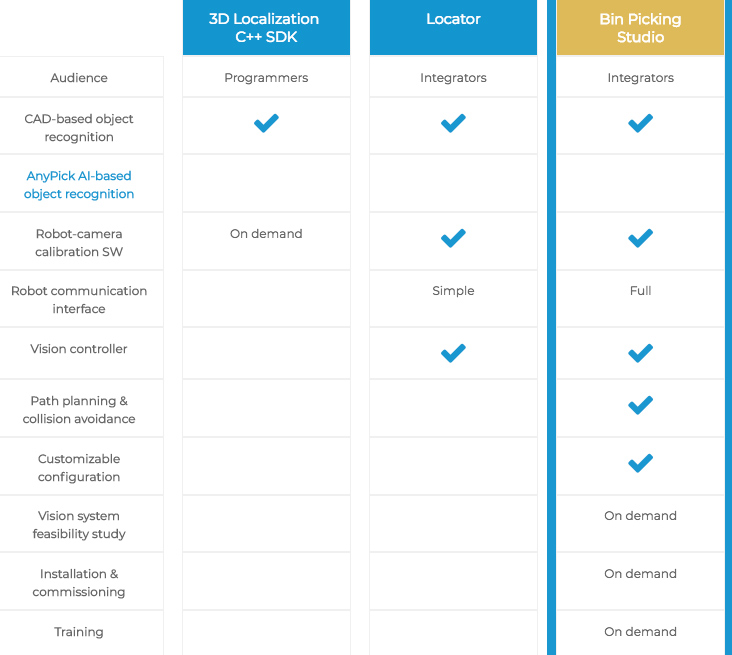
Photoneo fornisce SDK per la localizzazione degli oggetti e soluzioni complete per applicazioni di bin picking.
Il sistema di visione 3D è in grado di riconoscere parti disposte in maniera casuale all’interno di vasti volumi di scansione. Con le soluzioni di Photoneo è possibile afferrare gli oggetti evitando collisioni grazie alla manipolazione dinamica del robot.
Integrabile con la maggior parte dei robot in commercio: ABB, KUKA, STAUBLI, FANUC, OMRON, YASKAWA, KAWASAKI, UNIVERSAL ROBOT, MITSUBISHI ELECTRIC
È ora di tirare fuori il massimo dai tuoi progetti di presa da cassone!
L’ultimo aggiornamento del Bin Picking Studio consente di accrescere le tue competenze sulla presa da cassone ad un nuovo livello superiore! La nuova versione 1.6.0 offre all’utente possibilità di configurazione più ampie e una maggiore flessibilità attraverso l’aggiunta di nuove funzionalità.
➤ Gestione indipendente dei punti di presa pezzi per ogni sistemi di visione
Scegli il metodo di presa ottimale per ciascun sistema di visione e trova la strategia di prelievo più adatta per le varie forme di oggetti o posizioni delle ceste
➤ Taratura semiautomatica
Automatizza il tuo processo di calibrazione robot-sistema di visione 3D. Tutto quello che devi fare è scrivere un semplice programma robot e attendere che la calibrazione venga eseguita autonomamente, verificare e salvare i risultati.
➤ Monitoraggio del tempo di ciclo
Ottieni una panoramica sulle cifre di merito della tua applicazione, come ad esempio i tempi di ciclo in funzione delle diverse operazioni del sistema.
➤ Accesso remoto da un altro PC
Gestisci l’applicazione di presa da cassone da remoto tramite un browser Web utilizzando una rete locale.
➤ Bin Picking Studio 1.6.0 viene fornito in abbinamento con l’ultima versione del PhoXiControl per la gestione degli scanner di visione PhoXi 3D